The 34th All Japan Micromouse Contest was held at Nagareyama City Lifelong Learning Centre on November 23rd and 24th 2013. This was my fifth visit to this event – arguably the World Championships for the micromouse contest.
Arriving on the Thursday, along with David Otten and Harjit Singh from the USA, our base was the Hotel Coco Grand at Kita-Senju. Kita-Senju turned out to be a busy area on the outskirts of Tokyo with easy access to Narita Airport, Tokyo central and, of course, the contest venue. Our hosts had chosen particularly well and I think we were all agreed that we would be happy to choose this hotel for ourselves if we were ever to return to this area again.

Friday Practice
Practice was possible as usual through Friday afternoon. This was the opportunity to test against the actual maze walls to be used and the track type fro the line followers. It was also our chance to meet once more with all the other competitors and friends we had made over the years. While everyone wants to do well, I am always impressed by the way all the contestants are to helpful and free with assistance and information. Certainly, without this contact, I don’t think I could have made as much progress as I have.

For my part, Decimus 4 behaved almost impeccably. I had discovered a couple of problems with some particular maze configuration which I fixed up and had to test the changes needed for the Japanese fastest-run-counts rules. My mouse ran so well that I was left wondering exactly what I needed to do and I was feeling pretty confident that it would perform as well as I could hope in the contest. My confidence, of course, lasted only until I got back to the hotel when I started to worry about all sorts of imagined problems.
One of those problems was that, in my excitement, I forgot to calibrate the mouse sensors against the contest walls. Since this mouse had not run in Japan before, I had no historic data to use. With registration and qualifiers starting first thing, it was really important to get there early so that I could run the calibrations before the one small practice maze was completely swamped. On the Friday afternoon, the queue to use this maze was about 30 minutes long.
Prior to the contest we had been mailed a complete list of entries. It was going to be a busy weekend. There are four events altogether. Line followers (called Robotrace in Japan) with 125 entries, Micromouse Freshman Class ( for entrants that had not been in a contest before) with 115 entries, Micromouse Classic Expert Class ( in which I was entered) with 72 normal entries plus 12 seeded entries and Micromouse Half-size with 37 normal entries and 8 seeded entries. The seeded entries were mice that had qualified by winning or placing highly enough in regional contests held across Japan earlier in the year. Altogether 369 robots and their builders/handlers. Busy indeed!
After practice, we took ourselves off into Tokyo to sample the South Indian restaurant we had found last year. After that, we took a quick walk up and down part of the Ginza shopping area famed for its big-name shops.




While there a group of Japanese girls asked us to take their picture, After that was done, they indicated that we should pose to have our picture taken too, After a little embarrassed shuffling around, we formed up as asked. Only then was it apparent that they didn’t want to take our picture but were offering to take a picture for us, using our camera. We didn’t have one but I gave them my phone to use to save a little face all round.
Saturday Qualifiers
As on previous occasions, I simply did not get a chance to watch any of the Freshman class mice although I did note that there was a general improvement in the standard of many of the robots that I saw in practice.
The Saturday is taken up by the complete Freshman event and the qualifiers only for the other events. Micromouse Classic needed two mazes to get through the qualifiers and I was to run 13th and trying not to take my entry number as an unlucky omen. Dave Otten, with his line follower, Jehu, had drawn number 88 which is considered lucky in Japan. In my group, I was to run just after Khiwe Tzong-Yong’s Excel-8m so I had a great seat to watch one of the top entries do it’s stuff. Harjit Singh’s Zeetah VI ran soon after me and Dave Otten’s MITEE 13 was running at about the same time as me in the other group.
The qualifier maze was reasonably straight forward with two principal paths of 52 squares. Large areas were walled off which I guess was to prevent too much time wasted in searching. The organisers needed to get the qualifiers done as fast as they could.
Decimus 4 managed a run of 5.913 seconds and was eighth fastest to qualify, Zeetah VI achieved a 6.583 second run and MITEE 13 navigated the maze in 8.220 seconds. The fastest qualifier was 4.790 seconds and the slowest was 12.838 seconds. For the final, 24 mice were selected to join the seeded entries on the Sunday.
Saturday evening, we had dinner in the food court in the basement of the huge department store adjacent to the Station at Kita-Senju. All kinds of food was available both regional and international. By international, of course, I mean MacDonalds, KFC and Subway. I stuck to local food randomly selected. As usual, it was all good but I still have little idea what I actually ate.
Overnight, I felt confident enough to remove the speed limit I had placed on diagonal runs and to increase the speed of all turns by 10%. Not a lot but enough to take about one third of a second off a typical maze run time.
Sunday Finals
Looking back, it is remarkable how quickly the weekend passes. Once you get past the rather ridiculous idea that it is at all sensible to fly thousands of miles for a few minutes running your mouse against the best in the world, and that the jet lag and minimal sleep are in any way good for you, it all goes by in a bit of a blur.
The micromouse classic expert class finals were held in the afternoon and all the events ran straight on without a break. Since the Nagareyama venue was largely without food (other than some good brownies), we went prepared with bags of sandwiches and random junk only to find that there was a good store about 10 minutes walk away. Last year though, we went out for food and missed getting a good view of one of the events so it probably worked out well in the end.
The handbook that had been sent out before the contest contained all the instructions and timetables in cartoon form. Very thoughtfully, an english version had been provided for overseas entries.
Robotrace
The robotrace event had, I think, 33 entries in the final. The course was long as expected and had a couple of interesting curves of very large radius. The rules say nothing about maximum radius so this may have been an unexpected feature for many robots.
There was a very wide range of robots in this event and there is still no sign of the kind of convergent design to be found in the maze events.
Dave Otten’s Jehu had some problems with a particular, subtle feature and, in spite of being given the lucky number 8 again, could only manage a best time of 1:01:111. Not, as it might appear, a binary time. The eventual winner by a full five seconds and with a time of 17.997 seconds, was Cartis03 built by Hirai-san.
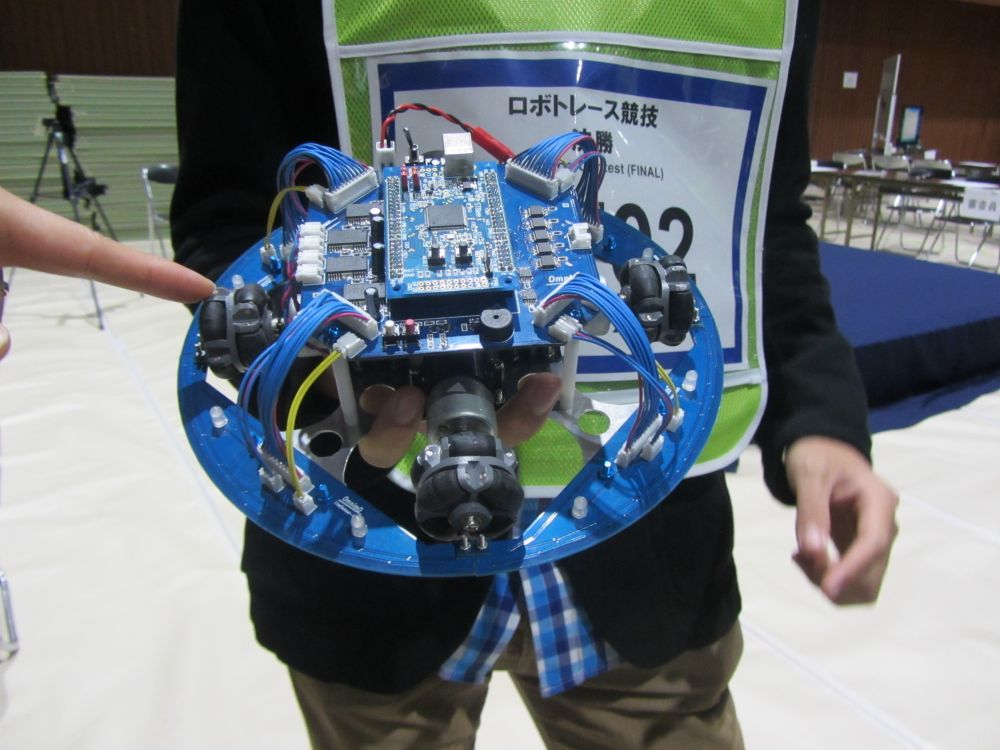
A few entries in this event deserve special mention. The first is OmniO which was notable because it used omni-directional wheels and a ring of 40 sensors to allow it to completely navigate the course while always pointing in the same direction:

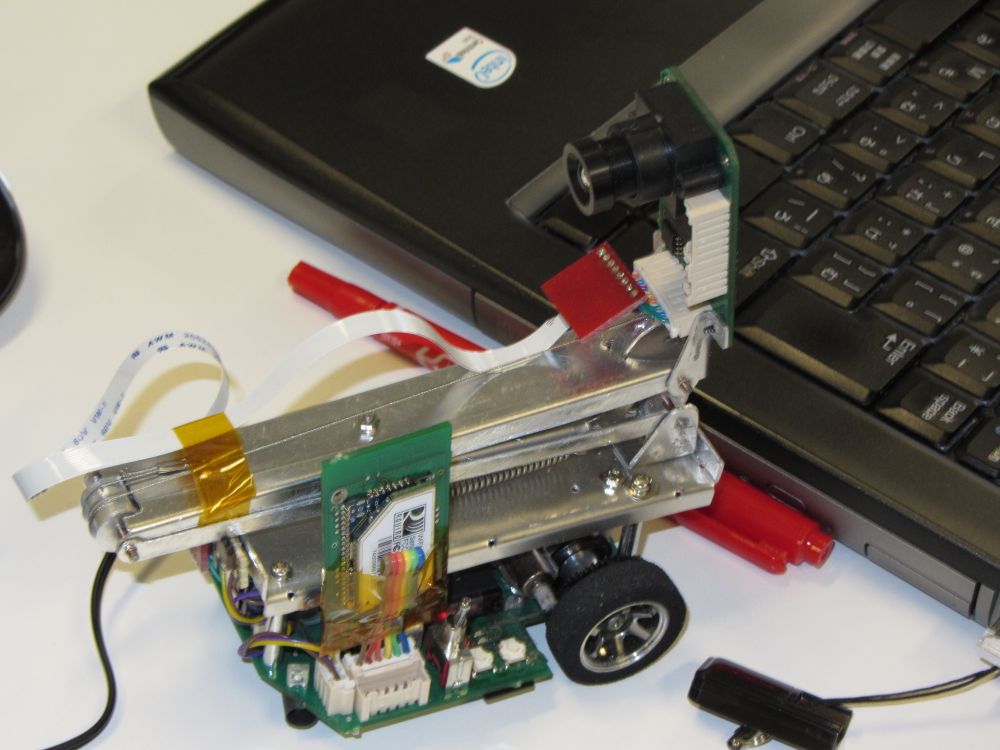
The second I do not have the name for. It was notable as being steered by a camera. I believe this to be a first but cannot be sure. The camera is attached to a servo that steers the front wheel. Like the robots that have a steerable boom, a control loop keeps the sensor centred on the line. Unlike those robots though, I believe that the body simply follows along. Or pushes to be more accurate.

As well as a hovercraft, that didn’t really hover, the line follower contest featured an entry made from a small helicopter. This did actually get off the ground and traced the line for a short distance. I hope to see this complete the course on another occasions:

Micromouse Expert Class
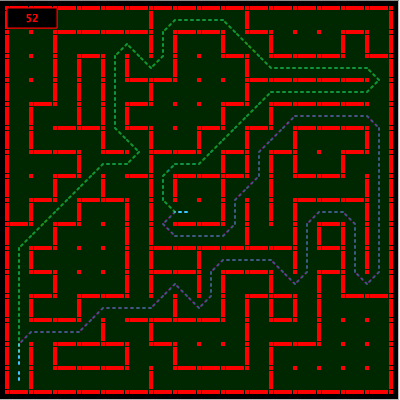
The maze for this year’s final was unusually long:
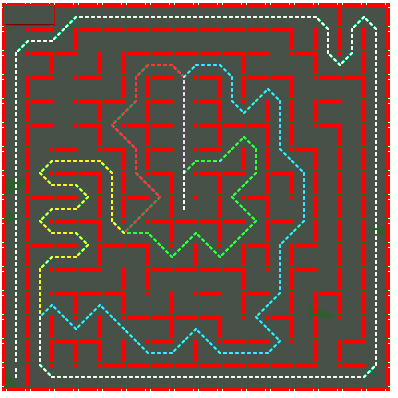
There were several potential routes. Three only are shown above. Mine took the yellow route but I think all the routes got used. Of particular interest were the long straights with no gaps to allow forward error correction. At the end of each of these was a feature that looks like it is intended to catch out mice that have poor forward error correction and may be tempted to turn earlier than they should. This feature was repeated a lot. It nearly caught me out. Looking carefully at Decimus 4, I notice that the tyres have worn down a lot and so the mouse is never travelling as far as it thinks it has. Examination of the data logs shows that forward error corrections all show this happening. I wish I had noticed before the contest and recalibrated the encoders. It would have saved a bit of trouble I think.
This was my event. Everything was tuned and tweaked and I just had to wait my turn. Which was pretty nerve-wracking. Because of my good performance in the qualifiers I was running towards the end of the event. The seeded mice were scattered among the other runners in no discernable order. Dave Otten got to run fairly early but had some trouble with sensors and unfortunately could only get a search run time of 41.244 seconds. Shortly after, Harjit Singh ran Zeetah VI and got in some good runs, posting a best time of 13.508 seconds. Enough to get 14th place at the end of the contest.
A couple of the seeded mice ran then, including Kato-san’s tetra. Tipped for first place, it managed to post a time of 7.939 seconds placing it 0.7 seconds ahead of the current second place mouse and way ahead of the current third place mouse – Kojima-san’s Kojimouse7CL with a time of 10.844 seconds.
Eventually, it was my turn to run. The search performed flawlessly although it did confuse our commentator. Because I have yet to write a good search algorithm, Decimus 4B comes all the way back to cell 1 at least once during the search. It is important not to enter the start cell until you are ready for a speed run because that would mean the start of a new run and you only have five. Wasting a run is not good. During the search then, D4B ran quickly back to cell 1, turned around and dashed off for some more searching. Our commentator seemed to think had missed the start square and tried to do an autostart run. The first, search run was very quick although not as fast as Zeetah VI which, I think, got the fastest search time.
The plan was to search and then do a safe, modest speed run just to be sure of getting a time on the board. D4B crashed on this ‘safe’ run and my confidence pretty much went there and then. A second go at the same speed however got me the time I needed (12.193 seconds). This was a fraction slower than the mouse before me and I had two runs left. The next run was performed at a higher speed. And it crashed as well. I was not too worried as I had already recorded a good time but I wanted better and I knew the mouse could go a lot faster. My final attempt was again at the next safe speed and I was starting to run out of time. To add to my mild but growing panic, the start button seemed to be sticking and precious seconds went by while I tried to get the mouse started. Eventually all was well and Decimus 4B set off for its last run in the 2013 All Japan Micromouse contest. The time recorded was 11.318 seconds and, for a while at least, I was in fifth place with only seven more mice to run. Nakajima-san was the very next to run and managed a time of 11.024 seconds. Of the remaining six mice, two crashed out. Khiw Tzong-Yong had some very unusual bad luck and only got a time of 11.093 seconds with Excel-8m. Three excellent Taiwanese mice finished off the event with times good enough to get them 3rd, 4th and 5th place.
While tracking all this I lost count of the results but was astounded to learn that I had finished tenth. Top ten in Japan! I could not have expected more. What’s more, I knew that the mouse had more to give. There were two more speed settings available that, without the missed corners that led to the two crashed, might have improved the score some more. Of course, everyone could do better if only they didn’t crash but I was happy. I still have the smile on my face.
A special mention should go to Shinichi Yamashita. You may recall that last year he had a mouse that used a camera to take a picture of the entire maze, from the start square, map it and then run directly to the centre. This year it managed the complete operation with great success. This, I think is a first.
Half-size micromouse
The half-size maze was big. This year, all of the 32×32 space was used. As I have no editing software for that contest, a photo of the displayed sheet will have to do:
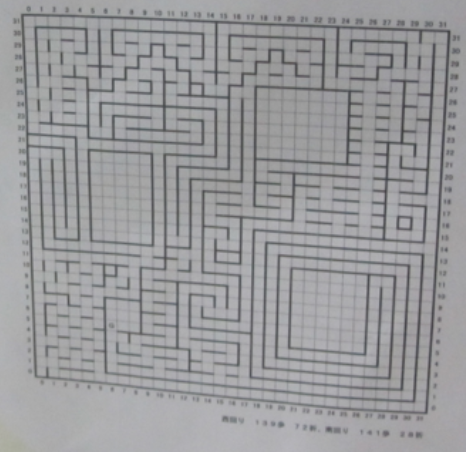
Searching such a maze takes some considerable time and even the best mice needed over a minute to find the goal for the first time. Once they had though, some inpressive times were posted. The winner, Kojima-san, managed a very impressive time of 7.124 seconds – more than 2.5 seconds faster than Khiew Tzong-Yong in second place.
Awards Ceremony
In the awards ceremony, I mentioned to Harjit that I was worried that, if I was ever to win a prize in Japan, I would not realise my name had been called and that, having been called up, I would be unsure of why. Imaging my reaction then when, just as I finished the sentence, I looked up to find someone pointing at me to indicate that I should come up to the front. I was presented with a certificate and prize and I had absolutely no idea why. Harjit was highly amused. It was soon explained that the award was for exceptional progress as an independent competitor. I think. Harjit was full of amusement. Until the exact same thing happened to him. He was given a special award having been introduced to the contest by Dave Otten and then going on to beat him. I think.


This was another great All Japan Micromouse Contest. Especially, I have to say, for me and I am really pleased with the performance of Decimus 4B. I look forward to next year when I will have my sights firmly set on a top five place.
Everyone, however should be pleased and proud of their efforts. Even those who crashed out. Some of them simply tried too hard in the final run and may have got a better score if they had worked up to a fast run rather than down from a too-fast run.
The contest organisers and helpers all worked very hard to make this work well and they all deserve our gratitude and appreciation for a job well done.
If you want to see all the action for yourself, you can. The entire event was streamed live by NVS and they have uploaded the complete stream to Youtube.
Over on Robots-Dreams, Lem Fugitt has a gallery of pictures. I will post one up tomorrow.
Congratulations Peter! Very good result you obtained, good job!
I hope one year I can participate in one of those events.
Congrats! You will do even better next year!
Congratulations Peter. Your reality stories are reading like a book. I suggest to gather and publish them. Potentially a bestseller.