Line Follower First run
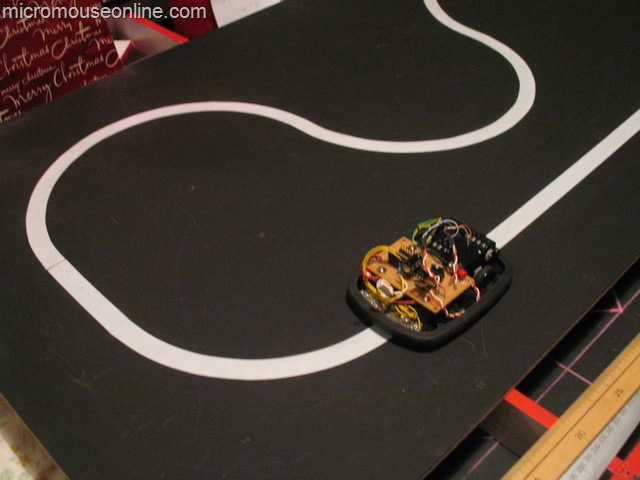 All the bits are together and the processor code tested. Bob should know when he is on track and how far out he is when he is off track. Time to get him running on the test track…
All the bits are together and the processor code tested. Bob should know when he is on track and how far out he is when he is off track. Time to get him running on the test track…
All the bits are together and the processor code tested. Bob should know when he is on track and how far out he is when he is off track. Time to get him running on the test track…