Bob’s second outing

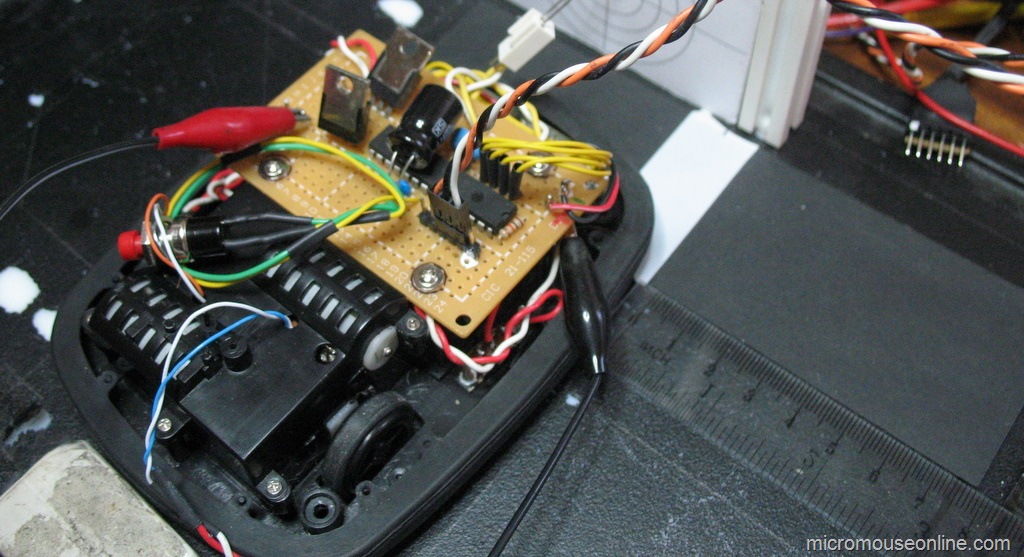
Bob has had a bit of minor surgery. I replaced the Darlington transistor motor driver with a L293D chip. Thing is, I forgot that the 293 has relatively large losses so Bob was much slower…
Bob has had a bit of minor surgery. I replaced the Darlington transistor motor driver with a L293D chip. Thing is, I forgot that the 293 has relatively large losses so Bob was much slower…
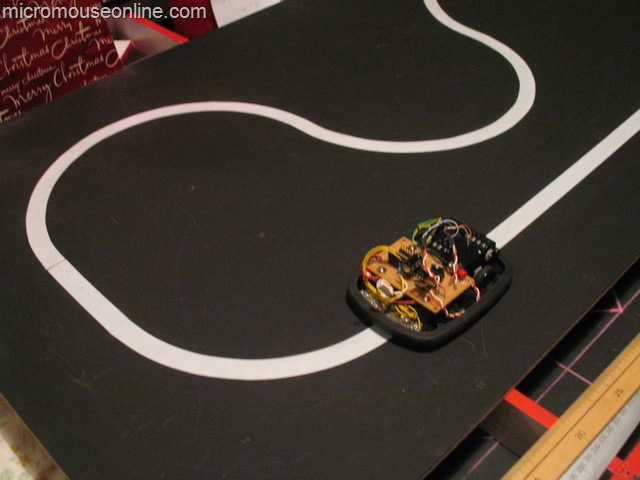 All the bits are together and the processor code tested. Bob should know when he is on track and how far out he is when he is off track. Time to get him running on the test track…
All the bits are together and the processor code tested. Bob should know when he is on track and how far out he is when he is off track. Time to get him running on the test track…
 With the sensors installed and the robot pretty well complete, it is time to see if they can actually do the job they were designed for. the idea is that the line of sensors will be able to measure the robots offset from the centre of the line over as wide a range as possible.
With the sensors installed and the robot pretty well complete, it is time to see if they can actually do the job they were designed for. the idea is that the line of sensors will be able to measure the robots offset from the centre of the line over as wide a range as possible.
 You can’t build a line follower without a test track to run it on. The proposed UK rules for this competition specify the track to be on a 300mm grid with fixed turn radii of 150mm. Well, I don’t have room for that and I don’t want to make tiles either so a little lateral thinking is called for…
You can’t build a line follower without a test track to run it on. The proposed UK rules for this competition specify the track to be on a 300mm grid with fixed turn radii of 150mm. Well, I don’t have room for that and I don’t want to make tiles either so a little lateral thinking is called for…
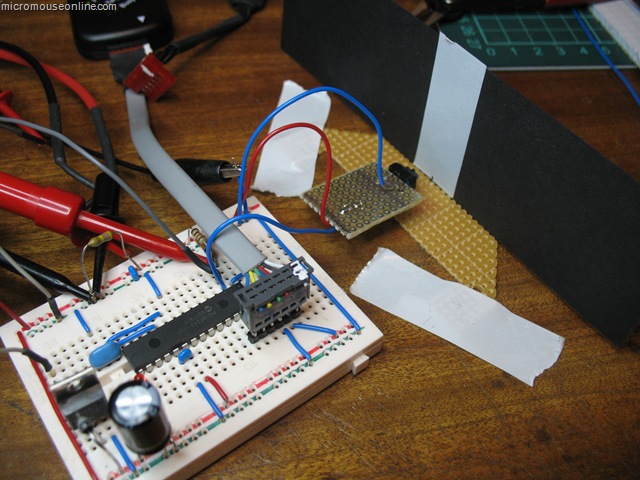 The simplest arrangement for a line follower is probably two sensors with digital outputs. As long as one can see the line and the other can see the background, the controller is happy otherwise it must turn left or right as appropriate. I was after something a bit more sophisticated for Bob the Line follower…
The simplest arrangement for a line follower is probably two sensors with digital outputs. As long as one can see the line and the other can see the background, the controller is happy otherwise it must turn left or right as appropriate. I was after something a bit more sophisticated for Bob the Line follower…
 Once all the parts have been chosen and the schematics drawn, it is just a case of getting on with building the bits…
Once all the parts have been chosen and the schematics drawn, it is just a case of getting on with building the bits…
 Line followers are a perennial favourite of the small robot builder. It is not hard to make something that will bumble about and follow a line marked out on the floor. the technology can be very simple but the same basic idea is used in sophisticated robots on factory floors. The tricky part is in making the line-follower fast and smooth in its response. Whether or not I can do that remains to be seen but I am going to have a go …
Line followers are a perennial favourite of the small robot builder. It is not hard to make something that will bumble about and follow a line marked out on the floor. the technology can be very simple but the same basic idea is used in sophisticated robots on factory floors. The tricky part is in making the line-follower fast and smooth in its response. Whether or not I can do that remains to be seen but I am going to have a go …